Descargado 35 veces










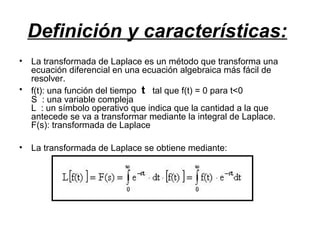


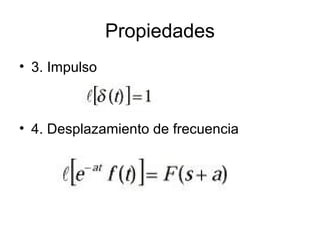

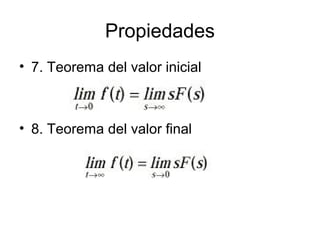












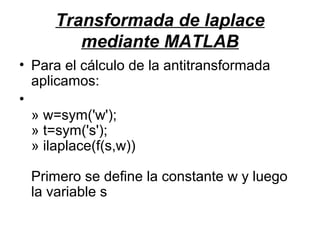



El documento trata sobre el control automático y la transformada de Laplace. Explica que la transformada de Laplace convierte ecuaciones diferenciales en ecuaciones algebraicas más fáciles de resolver y describe algunas propiedades como la linealidad y el desplazamiento en el tiempo y la frecuencia. También muestra cómo usar MATLAB para calcular transformadas de Laplace directas e inversas.



































































