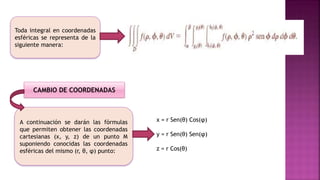
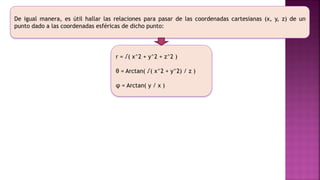
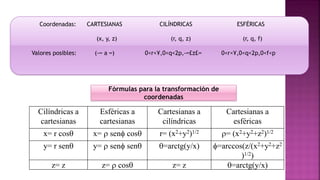
El documento aborda los sistemas de coordenadas, incluyendo las cartesianas, cilíndricas y esféricas, describiendo cómo se utilizan para determinar la posición de puntos en diferentes dimensiones. Explica las fórmulas necesarias para convertir entre estos sistemas y sus aplicaciones prácticas en campos como la cartografía y la construcción. Además, se presentan ejemplos que ilustran cómo calcular distancias y transformaciones entre las diferentes coordenadas.