Descargado 43 veces
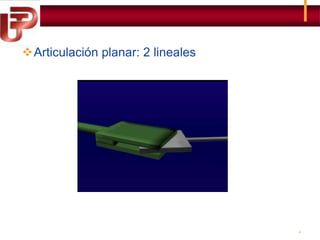
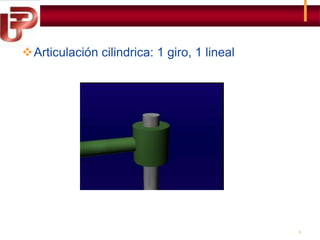
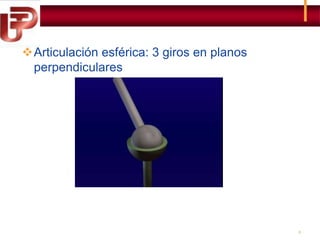
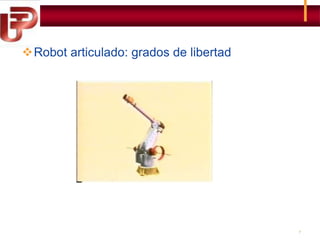



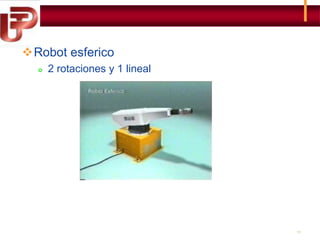
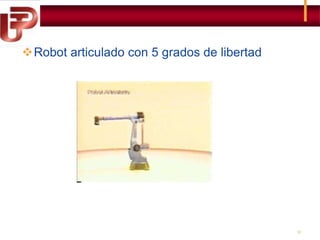
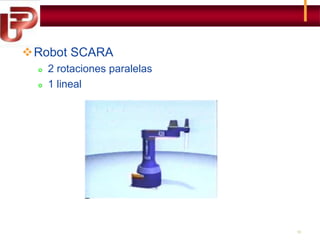
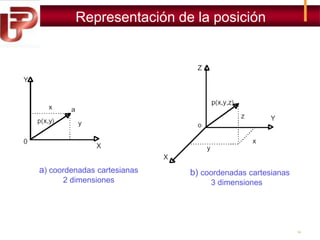
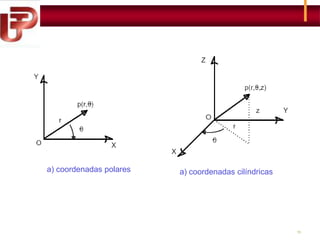
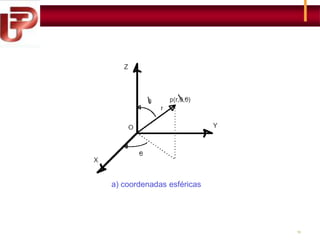
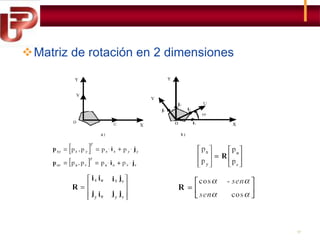
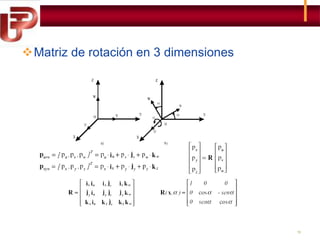
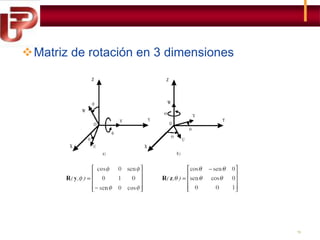
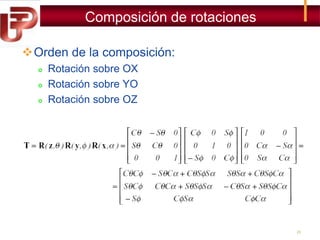
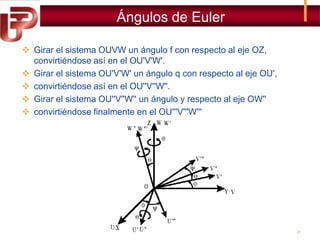
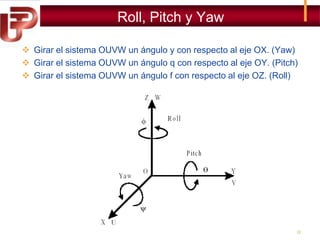






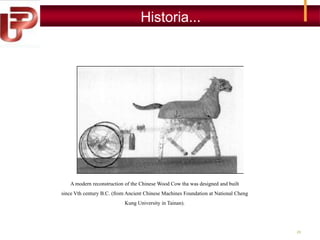
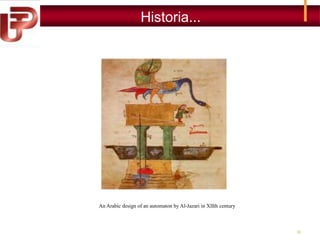
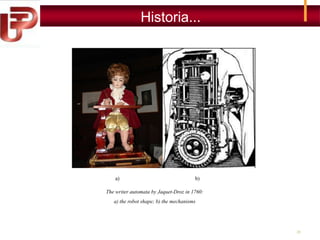
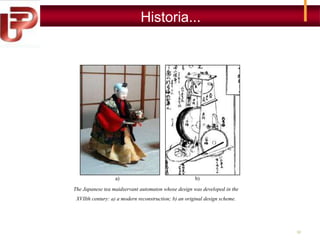

El capítulo describe diferentes tipos de articulaciones y configuraciones de robots, incluyendo articulaciones lineales, de giro, planares y esféricas. También discute la representación de la posición de robots a través de coordenadas cartesianas, polares y esféricas, así como matrices de rotación y ángulos de Euler. Brevemente revisa la historia temprana de robots, incluyendo diseños de máquinas antiguas chinas y árabes, así como autómatas del siglo 18.








































![[ Robótica ]](https://cdn.slidesharecdn.com/ss_thumbnails/robtica-150630195816-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)





































