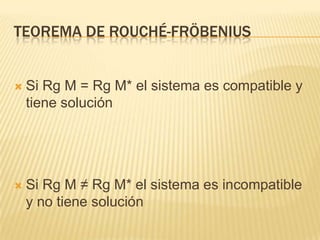
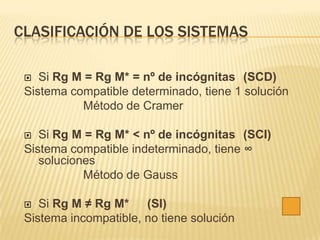
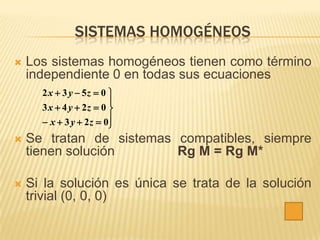
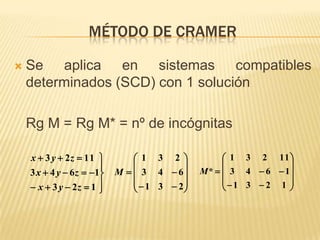
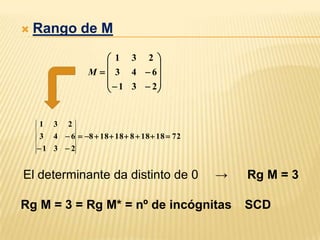
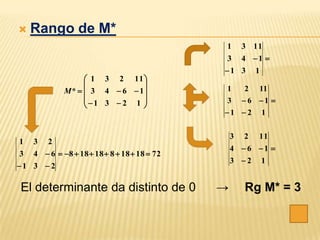
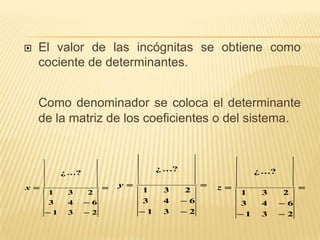
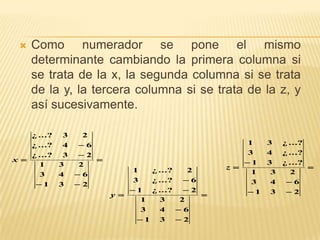
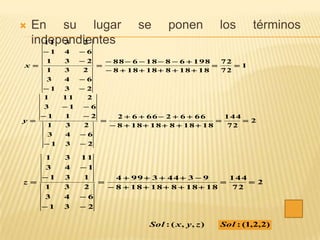
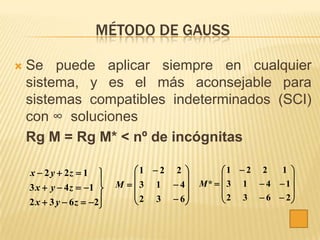
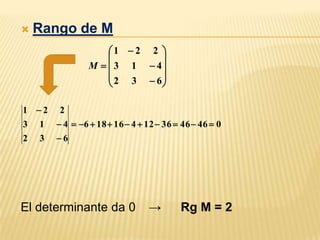
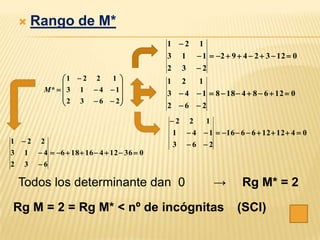
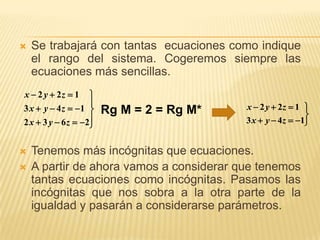
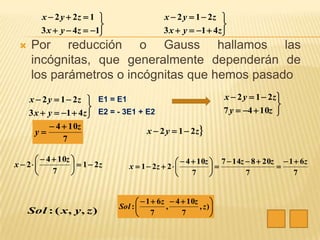
Este documento describe los sistemas de ecuaciones lineales y los métodos para resolverlos. Explica que un sistema puede ser compatible o incompatible dependiendo de si el rango de la matriz de coeficientes es igual o no al rango de la matriz ampliada. También describe los métodos de Cramer y Gauss para resolver sistemas compatibles determinados e indeterminados respectivamente.


















































![Fracciones parciales[1]](https://cdn.slidesharecdn.com/ss_thumbnails/fraccionesparciales1-111109101055-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)































