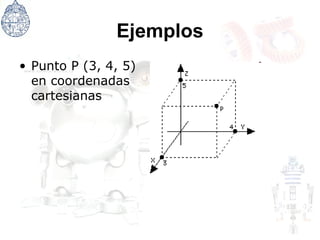
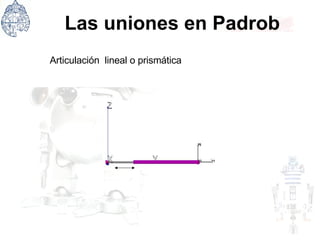
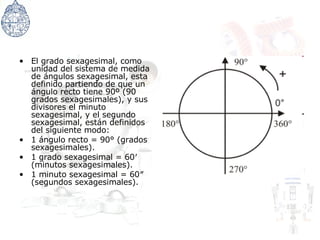
Este documento presenta conceptos básicos de geometría analítica y sistemas de coordenadas. Explica el plano cartesiano y las coordenadas cartesianas, y cómo se pueden usar para definir la posición de un punto en el espacio. También introduce conceptos como grados de libertad, tipos de articulaciones mecánicas, y unidades para medir ángulos como grados, minutos, segundos y radianes.