Ingeniería de control: Criterio de estabilidad de Nyquist con Matlab
•Descargar como PPT, PDF•
0 recomendaciones•197 vistas

Ingeniería de control II

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Ingeniería de control: Criterio de estabilidad de Nyquist con Matlab
Similar a Ingeniería de control: Criterio de estabilidad de Nyquist con Matlab (20)
Más de SANTIAGO PABLO ALBERTO
Más de SANTIAGO PABLO ALBERTO (20)
Último
Último (20)
Ingeniería de control: Criterio de estabilidad de Nyquist con Matlab
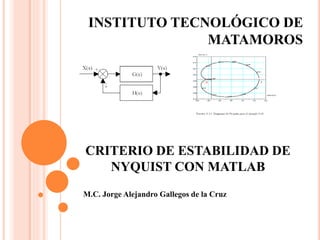
- 1. INSTITUTO TECNOLÓGICO DE MATAMOROS CRITERIO DE ESTABILIDAD DE NYQUIST CON MATLAB M.C. Jorge Alejandro Gallegos de la Cruz
- 2. INSTRUCCIONES PREVIAS 1. Para determinar la estabilidad de un sistema de control utilizando el Criterio de Estabilidad de Nyquist con Matlab, se utiliza directamente el comando: nyquist(num,den) a la función de transferencia de lazo abierto del sistema, G(s)H(s). Posteriormente se analiza si la traza obtenida rodea o no el punto (-1, 0) de acuerdo a lo siguiente:
- 3. a) El punto -1 + j0 no está rodeado. Esto implica que el sistema es estable si no hay polos de G(s)H(s) en el semiplano derecho del plano “s”; de lo contrario, el sistema es inestable. b) El punto -1 + j0 queda rodeado una o varias veces en sentido contrario al de las agujas del reloj. En este caso, el sistema es estable si el número de rodeos en sentido contrario al de las agujas del reloj es igual al número de polos G(s)H(s) en el semiplano derecho del plano “s”; de lo contrario, el sistema es inestable. c). El punto -1 + j0 queda rodeado una o varias veces en el sentido de las agujas del reloj. En este caso el sistema es inestable.
- 4. 2. Una vez analizada la traza obtenida se concluye si el sistema es estable o no, esto se hace de acuerdo a los incisos anteriores. 3. Para comprobar el resultado de la estabilidad se puede usar el comando step(num,den) con la función de transferencia de lazo cerrado, o bien, desarrollando el sistema en Simulink y realizando la simulación propia del sistema.
- 5. EJEMPLO 1
- 6. Comando de Matlab Traza obtenida El punto -1 +j0 no queda no queda rodeado, por – tanto, el sistema es ESTABLE
- 7.
- 8. Comando de Matlab Gráfica obtenida Se observa que el sistema es ESTABLE
- 9. En simulink el sistema se desarrollaría de la siguiente forma: La respuesta obtenida es: Se observa que el sistema es ESTABLE
- 10. EJEMPLO 2
- 11. Comando de Matlab Traza obtenida El punto -1 +j0 no queda no queda rodeado, por – tanto, el sistema es ESTABLE
- 12.
- 13. Gráfica obtenida En Simulink: Se observa que el sistema es ESTABLE
- 14. La traza toca el punto -1+j0 por lo que se concluye que el sistema está en el limite de la estabilidad o se dice que es CRÍTICAMENTE ESTABLE.
- 15. Se observa que el sistema es CRÍTICAMENTE ESTABLE u OSCILATORIO
- 16.
- 17. Comando de Matlab Traza obtenida El punto .1+j0 queda rodeado 1 vez en el sentido de las agujas del reloj, por lo tanto el sistema es INESTABLE.
- 18. Se observa que el sistema es INESTABLE
- 19. En Simulink: